SMELTS Lift-Raft for On-Demand Fishing
On-Demand Fishing replaces persistent end lines & surface buoys with a subsea lift system activated acoustically at the time of retrieval. Gear remains on the seafloor until commanded to surface, where a controlled inflation sequence brings the unit to the surface for conventional hauling. The system is engineered for repeatable performance across inshore and offshore bottom-set fisheries.
Step 1: Set & Mark
Gear is deployed to the seafloor without a persistent end line or surface buoy. Depending on the acoustic system in use, the location may be recorded as a GPS surface drop point or acoustically marked during descent using a directional shipboard transceiver to determine the true seafloor position. Acoustic marking enables corrected positioning by accounting for drift and current during descent. Once the unit reaches bottom, the Lift-Raft remains inactive, conserving battery power and maintaining a low operational profile until commanded.

Step 2: Report & Virtualize
Following deployment, gear location data is transmitted to a secure cloud-based database and represented virtually on compatible navigation systems. Rather than publicly broadcasting precise coordinates, the system limits visibility to a defined operational radius, ensuring that only nearby users can view relevant gear markers. This preserves harvester privacy while maintaining awareness across mixed-use areas. The result is a digital layer of spatial organization that helps prevent gear overlap, reduces conflict between fixed and mobile fisheries, and modernizes traditional surface marking practices.
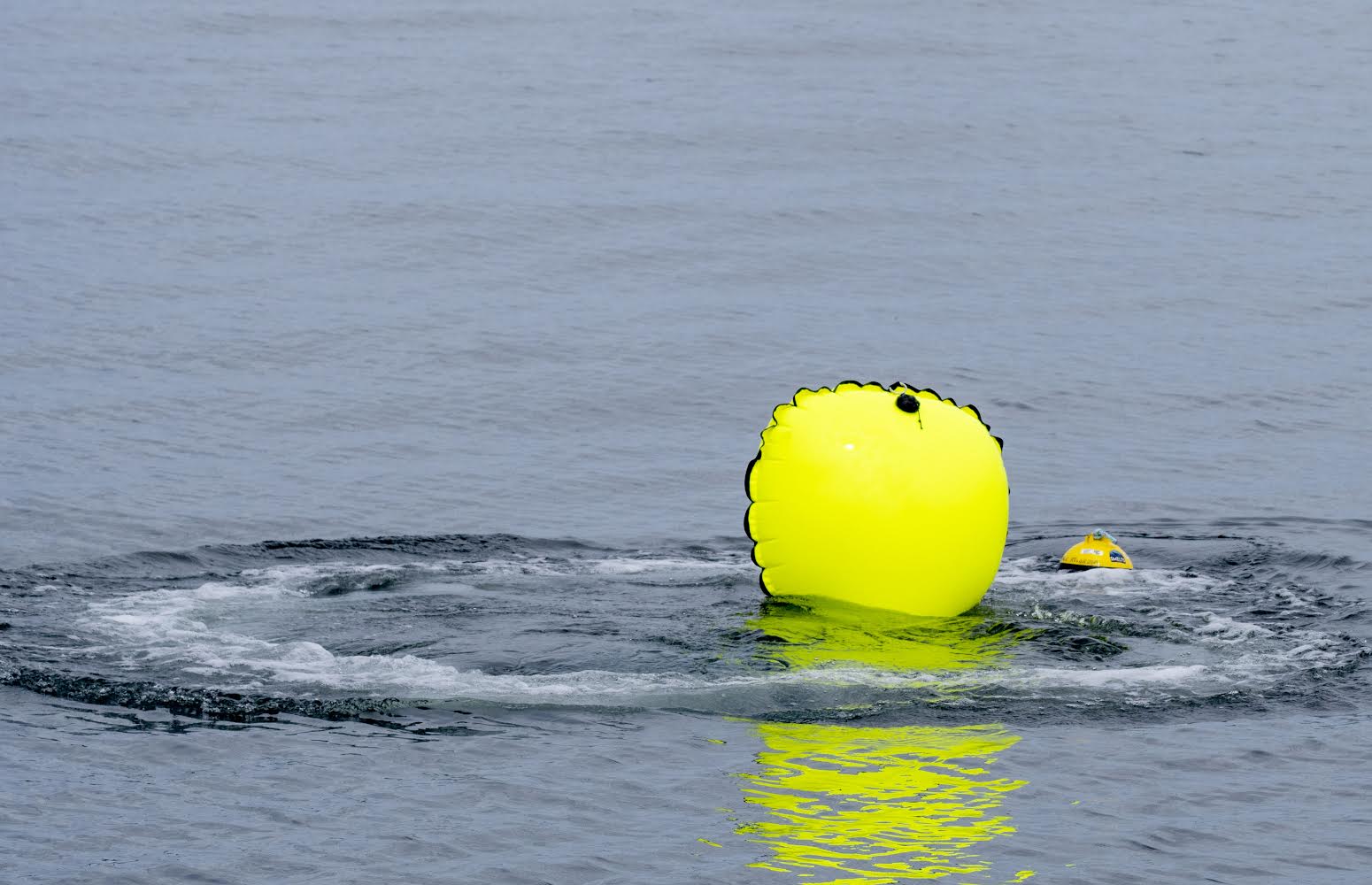
Step 3: Trigger & Surface
When retrieval is required, the vessel navigates to the recorded position and transmits a unique acoustic command specific to the targeted unit. Each Lift-Raft responds only to its assigned command sequence, preventing cross-activation and ensuring operational security. Upon verification, the system releases compressed air into the lift bag, initiating a controlled ascent profile. The Lift-Raft architecture is engineered to maximize lift cycles per tank fill while maintaining battery efficiency through optimized hardware design and power management. High-visibility lift bags and optional surface strobes improve detection in varying sea states, and larger models are capable of appearing on marine radar for additional situational awareness.
Step 4: Haul & Clear
Once the gear reaches the surface, it is retrieved using conventional hauling methods. During or immediately following recovery, the system communicates its retrieval status through the acoustic interface or associated topside system. The gear marker is then automatically cleared from the cloud database and removed from vessel displays, ensuring that only active deployed gear remains visible. The Lift-Raft can then be reset, inspected if necessary, and prepared for redeployment, maintaining a repeatable and controlled operational cycle.

See It In Action
Watch the full demonstration here, as presented during the 2025 Ropeless Consortium.
SMELTS On-Demand System Components
SMELTS Lifting Engine

The SMELTS Lifting Engine is a pressure-rated, air-powered retrieval platform designed for bottom-set gear. Housed within a durable frame, the system integrates a compressed air vessel, inflation control hardware, power supply, and acoustic receiver. The lift bag is engineered for controlled buoyant ascent, allowing the gear to surface in a predictable manner while minimizing stress on structural components. All hardware is designed for repeated deployments and straightforward servicing between cycles.
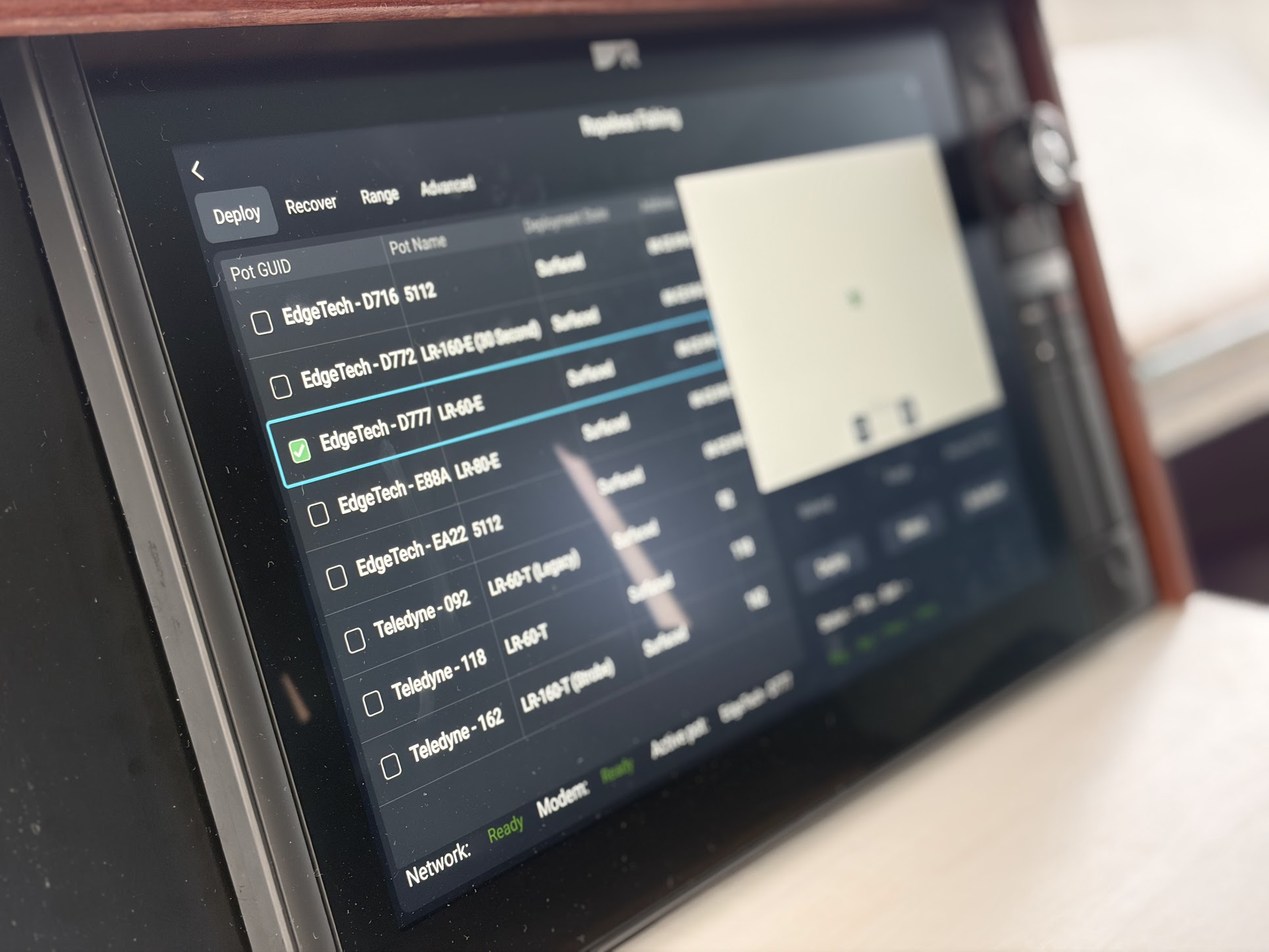
Topside Acoustic Controls
The acoustic control system provides secure, command-based communication between vessel and subsea unit. Each Lift-Raft responds only to its assigned coded signal, preventing cross-activation between nearby systems. Depending on configuration, operators may use portable deck units or fully integrated chartplotter applications to transmit commands and monitor system status. Directional acoustic capability enables not only activation, but also range and bearing feedback when supported by compatible transceivers. Integration with vessel electronics creates a centralized control environment at the helm, eliminating the need for multiple standalone devices.
Cloud Communication
Cloud communication is a required component of modern on-demand fishing systems. In the absence of persistent surface buoys, gear locations must be digitally reported to ensure visibility for regulators, neighboring bottom-set harvesters, and mobile gear fleets operating in the same area. Following deployment, gear position data is securely transmitted to cloud-based databases where it can be accessed and displayed on compatible navigation systems.
Visibility is controlled by defined proximity rules, allowing nearby operators to see relevant gear while preserving harvester privacy beyond operational range. Upon retrieval, gear markers are cleared from the database to ensure that only active deployments remain visible. This communication layer replaces traditional visual surface marking with a structured digital framework, maintaining spatial awareness and regulatory transparency without reintroducing end lines.
On-Demand Fishing systems are adaptable across a variety of operational environments. Inshore fisheries benefit from compact models designed for maneuverability and frequent haul cycles. Offshore operations leverage larger lift capacities and extended endurance for deeper deployments.
Fixed gear fleets can deploy multiple units across defined areas while maintaining accurate virtual marking and retrieval control. Research applications may use the same lift architecture to recover instrumentation or temporary subsea assets. Across these use cases, the core functionality remains consistent: controlled deployment, secure activation, and predictable retrieval.
%20Zack%20Klyver%20-%20Gill%20net%20Fishery.jpg)
By eliminating persistent end lines, On-Demand systems reduce interference with surface vessel traffic and minimize deck entanglement during deployment and retrieval. Retrieval timing is fully controlled by the operator, allowing gear to remain dormant until actively commanded.
Acoustic marking and command validation improve positional awareness compared to surface-only marking methods. Controlled ascent profiles reduce abrupt load shifts during surfacing, contributing to safer and more predictable haul cycles. The system replaces passive exposure with active control, shifting retrieval from continuous presence to intentional activation.

1003 Iowa Heights Road
Sedro Woolley, WA 98284
360-303-9388
info@smelts.org